Binocular Stereo Vision¶
“Epipolar geometry is the geometry of stereo vision” (cited from Wikipedia), which can be briefly illustrated as the following picture (cited from Wikipedia):

How to calculate depth map from binocular cameras has been widely and thoroughly discussed in various materials. For instance:
Here, we only provides the following two example code to calculate the disparity image from a single pair of left and right images.
Activity10.01.py shows the classical stereo vision block matching algorithm, which is heavily cited from https://github.com/opencv/opencv/issues/9783.
XXXXXXXXXX shows the classical stereo vision semi-global block matching algorithm, which is heavily cited from http://timosam.com/python_opencv_depthimage.
Our experiments are carried out on a single image pair as follows:

|

|
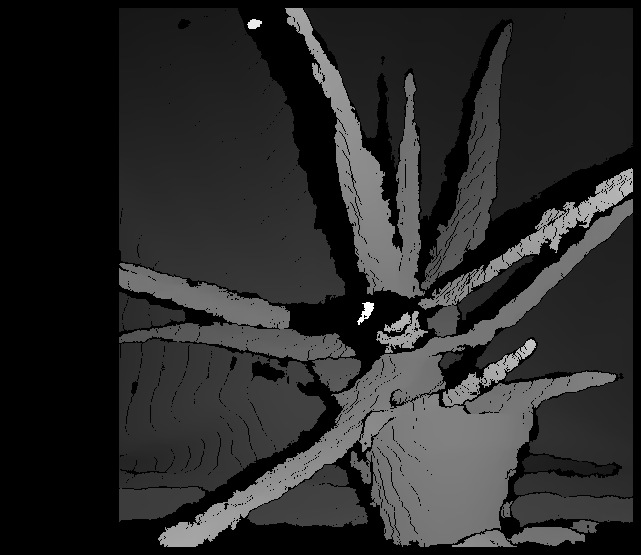
|
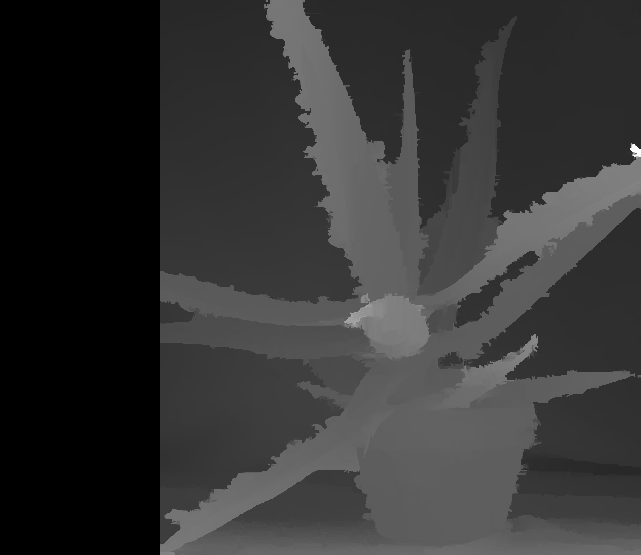
|
I’m still waiting for my econ-system binocular camera STEEReoCAM for the live stereo vision test.